





µFloat 1.0: The buoyancy engine
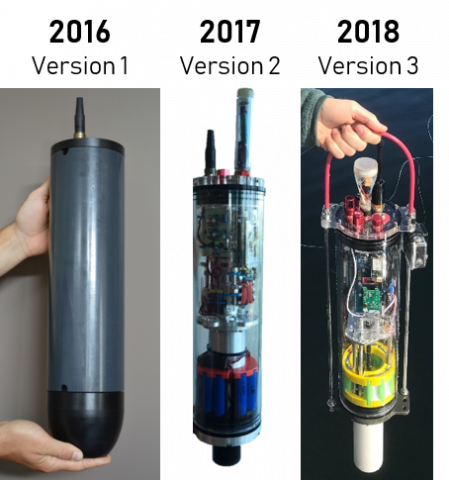
For the initial prototype he challenged a capstone team of Formula Motorsports students to develop a “buoyancy engine” – a device that can adjust whether it sinks or floats.
The team hand-built a hollow tube with a large piston attached to a motor and a basic computer. As the piston moved into the device, it became dense and sunk, as it moved out again, it created a hollow cavity and floated back to the surface.
µFloat 2.0: A prototype down under
In 2017, Harrison received support from the National Science Foundation’s Graduate Research Opportunities Worldwide program to do cooperative research in Australia with Matthew Dunbabin, a professor of electrical engineering and robotics at the Queensland University of Technology (QUT).
“I flew to Australia with a half-built float,” he remembers. “I had the buoyancy engine, but I still had to put together the full package of sensors and controls and build out a communication system.”
Over seven months, he prototyped the electronics, testing as he went in QUT’s swimming pool. Two days before his flight back to the U.S., Harrison and Dunbabin took a rented canoe out on the Maroochy River and tossed in the prototype µFloat. After a few tense minutes where they feared the float was lost, they located it, successfully completing the first field test.


Following each outing, the µFloat data improved, building the team’s confidence towards the key deployment at Agate Pass. There they would collect data from the µFloat swarm while Jim Thomson, an oceanographer at APL and civil and environmental engineering professor, gathered data in more traditional ways. A comparison between the two surveys would indicate how accurate and effective the uFloats are in practice.
Over the course of two days at Agate Pass, the team repeatedly deployed and retrieved the floats, amassing 340 drifting paths of tidal flow observations. One of the 20 µFloats went missing, but Harrison got a hefty dataset for the last chapter of his dissertation. As far as he’s concerned, the trip was a success.

Having defended his Ph.D., Harrison will continue to explore µFloat applications with APL and through MarineSitu, a marine instrumentation company spun out of the UW.
He credits teamwork for every step of his journey.
“A lot of life happens in eight years. I benefited so much from the amazing people and facilities at the UW. I never would have gotten to this point without a ton of collaboration and support.”

Story by Andy Freeberg
Lead photography by Mark Stone
Other images and videos courtesy of Trevor Harrison and UW µFloat team members
A project highlight on the Pacific Marine Energy Center website contains further project details, links to related research papers and a list of acknowledgements.